Robotics
Robotics is one of my true passions and was my main extracurricular in high
school. I’ve been involved in robotics for more than a decade at this point and what I’ve
learned along the way has
been invaluable. Not only has it shown me what I want to do for the rest of my life,
but it’s taught me how to do those things effectively as well. Throughout these
years I've learned everything from Computer Aided Design to
how to effectively manage teams and run a business. These skills have proved
essential to my success not only in high school but as skills for later in life as
well.
Click the buttons below to learn more!
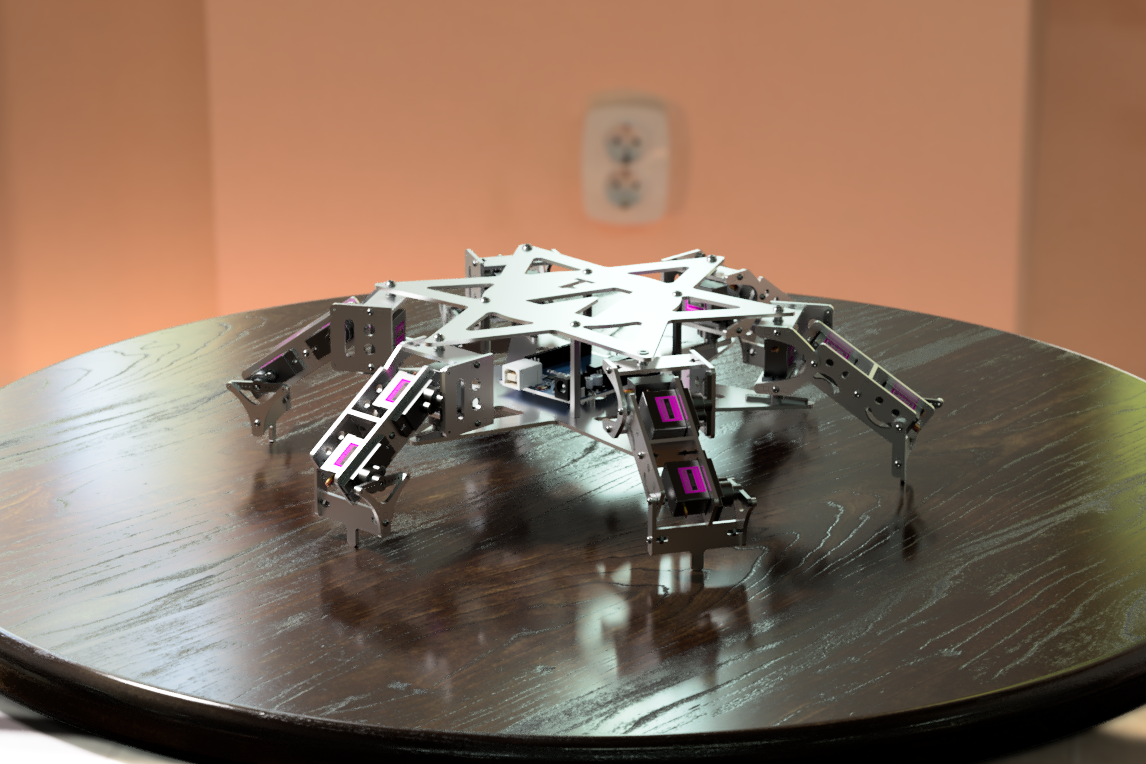
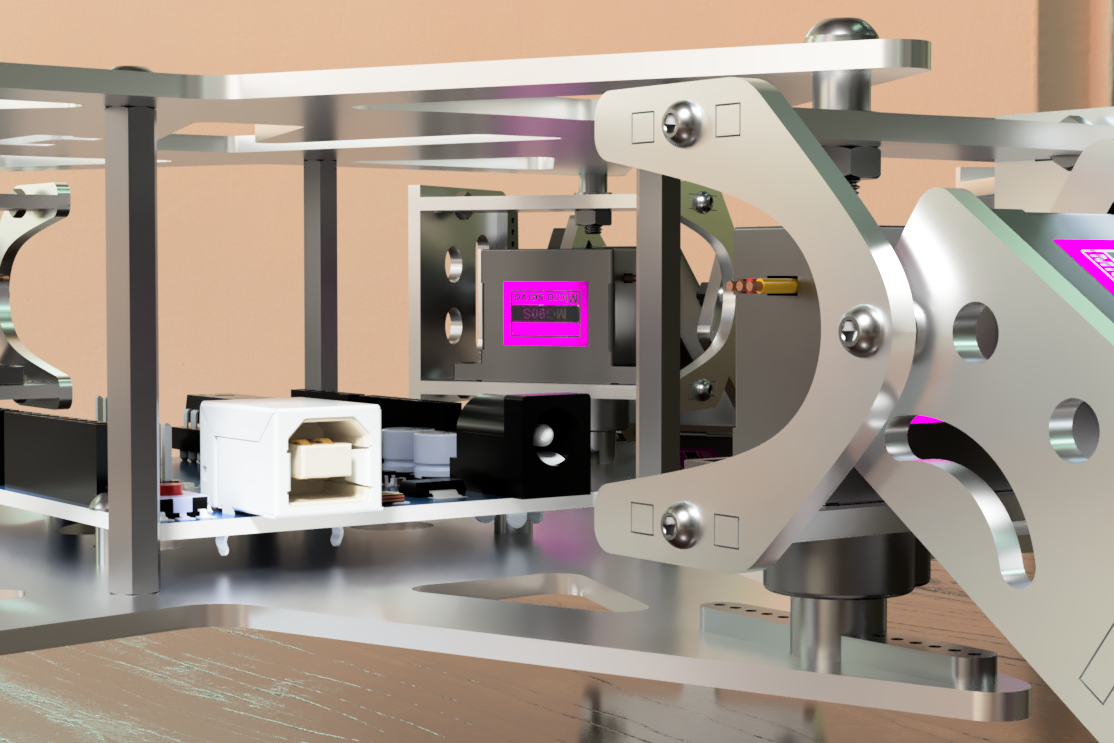
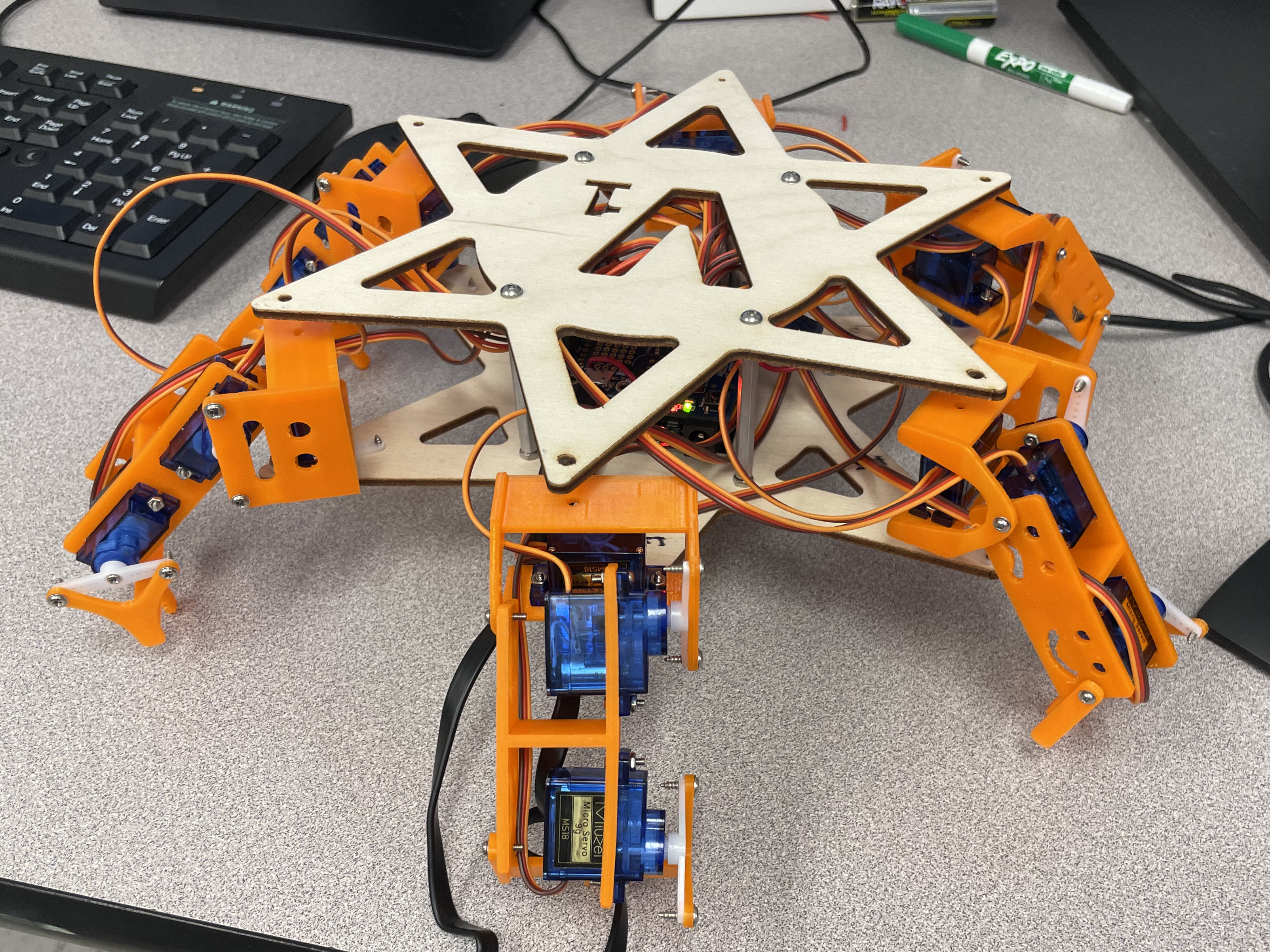
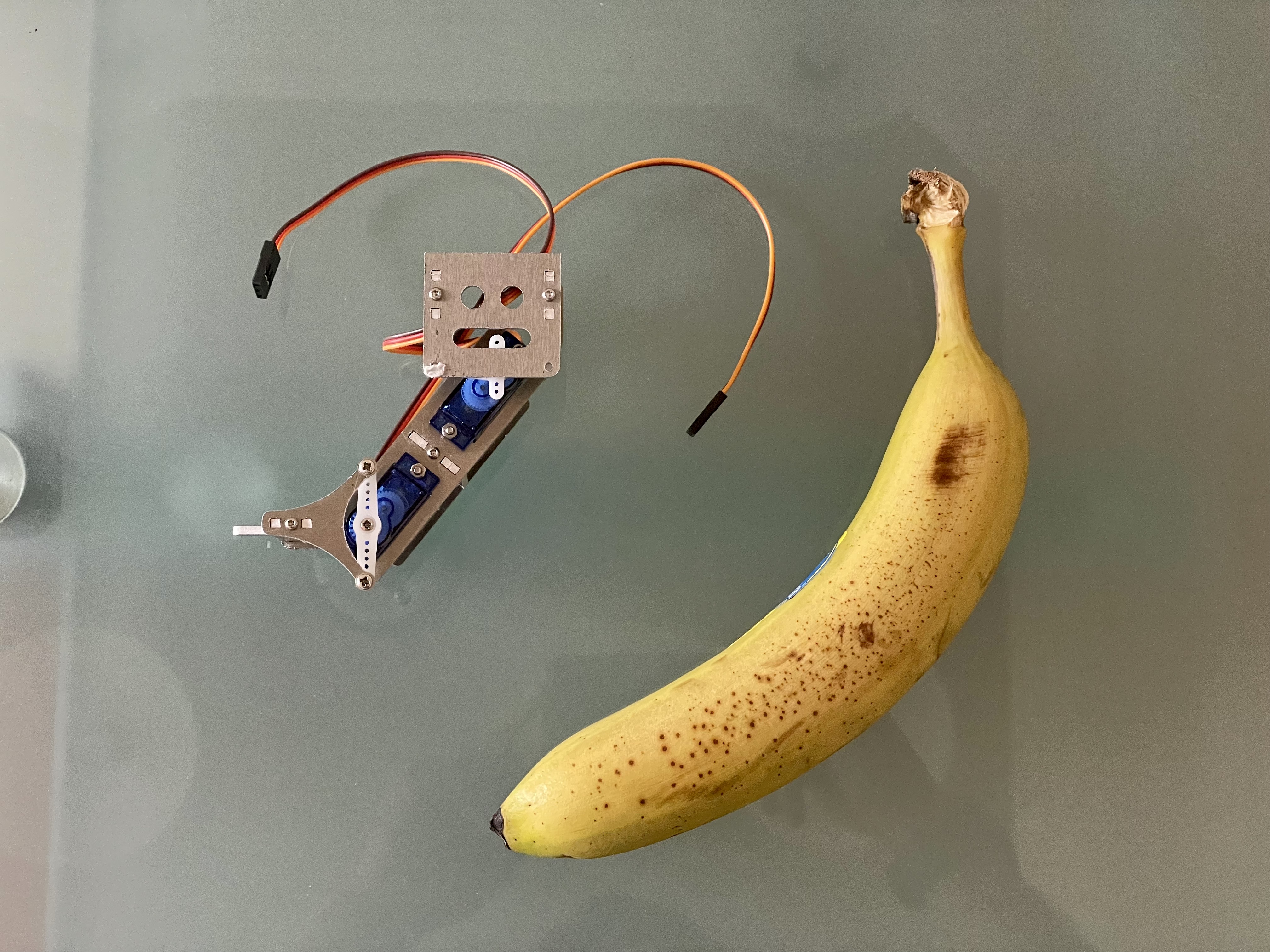
Here is my latest solo project: a 3D printed and laser cut hexapod I designed to learn Fusion 360 and how to manage large amounts of motors computationally. It was initially intended to be fully laser cut and was not due to budget limitations. It's controlled by an Arduino and has a total of 18 servos (3 per leg) which must be moved synchronously in order to keep the robot balanced.
Initial CAD Renders


End Product
This is what the physical product ended up looking like. It's made out of laser cut plywood and 3D printed parts coming out at a third the price of the metal design.

Videos
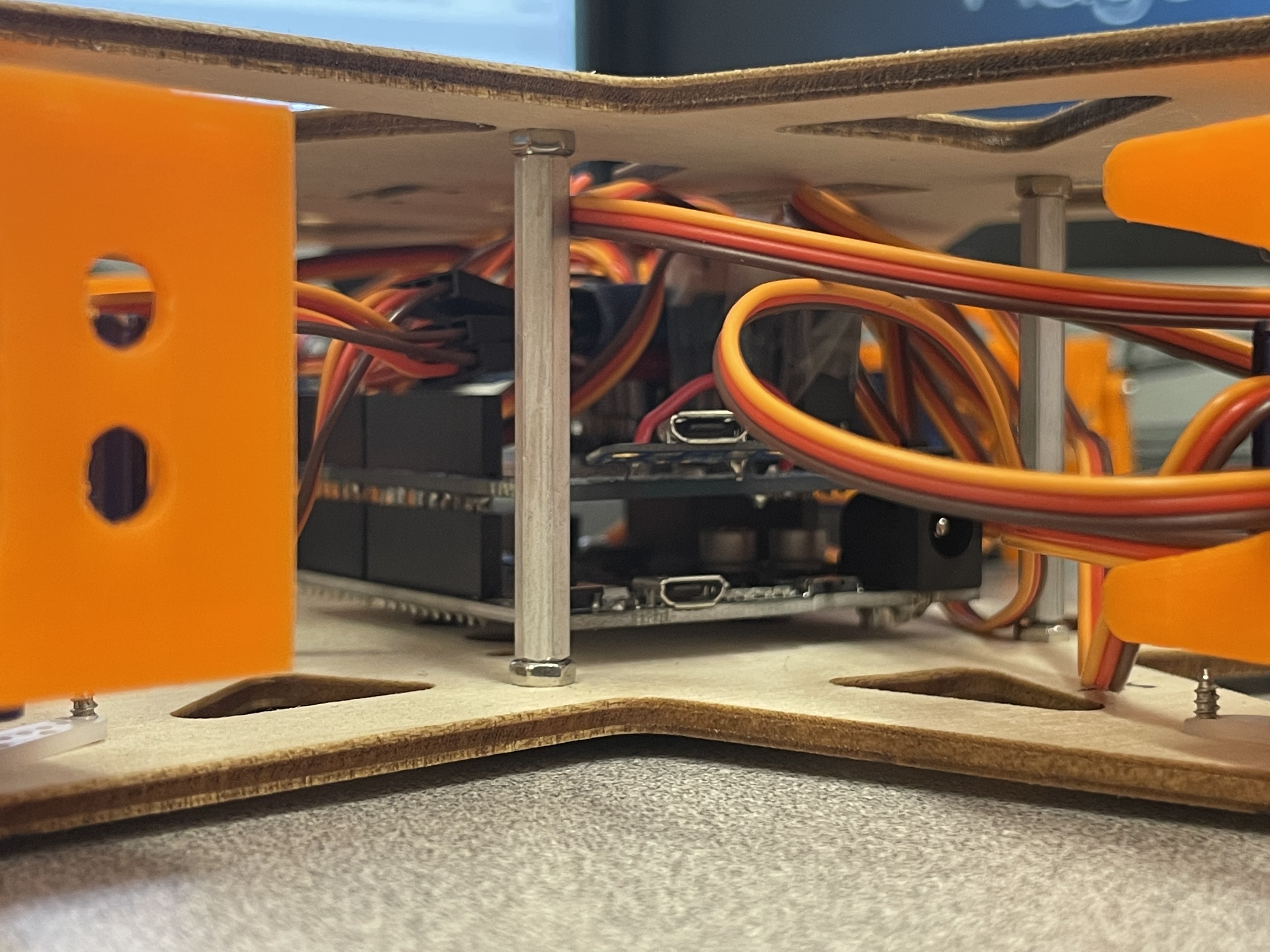
Here are some demo videos of the bot running. What you'll notice here is that one arm or another will fail to work in some circumstances. That isn't due to software but rather connectivity issues that are going to be addressed in the future.
What's next?
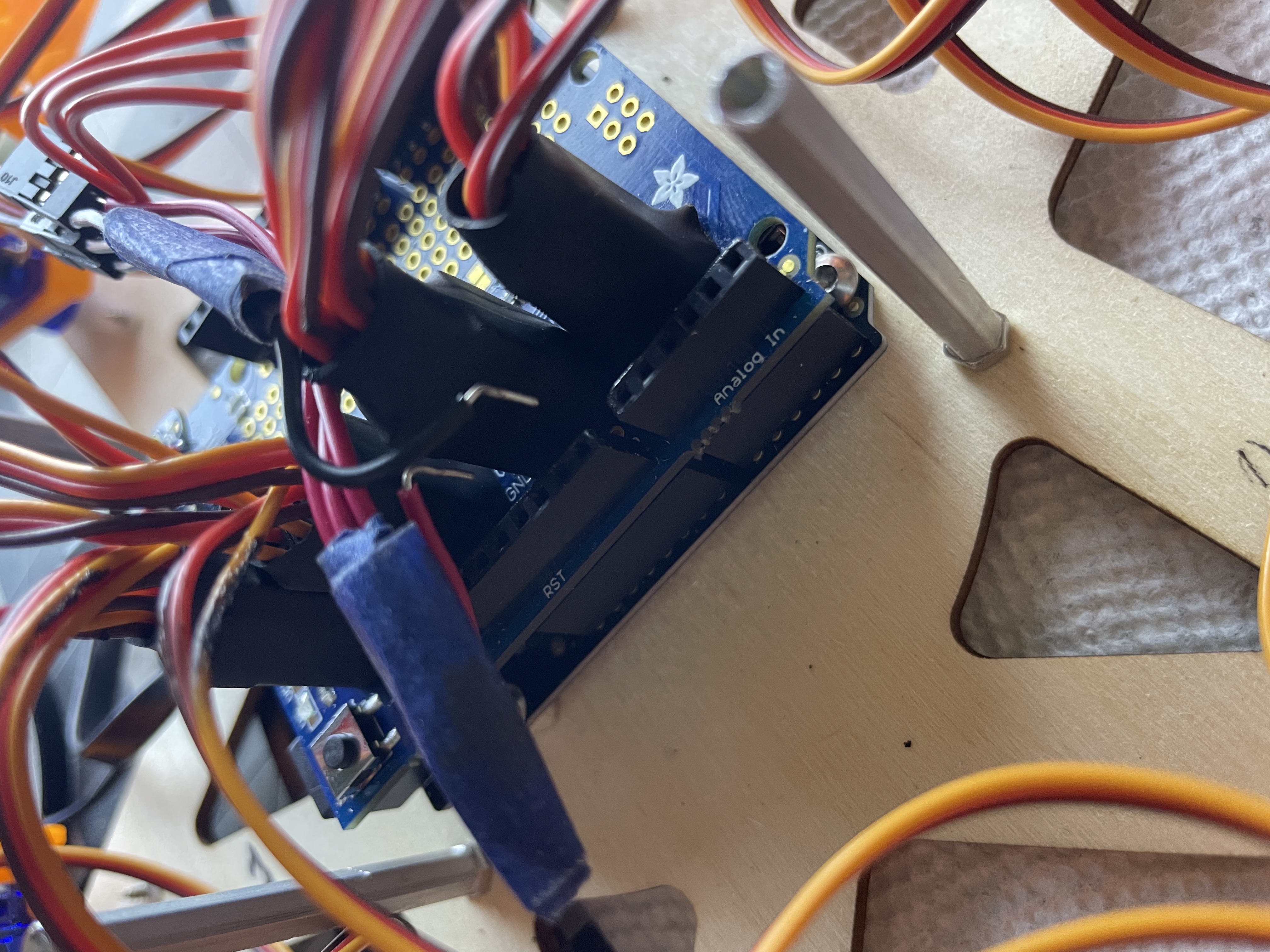
I fixed a host of dead servos and connectivity issues that had come from strenuous testing and improper wire management. For now, this project is on hold until I find interest in it again or it gets handed off to someone who wants to write some more serious code for it potentially continuing on my plans to create a User Interface to drive it with semi-automated controls.
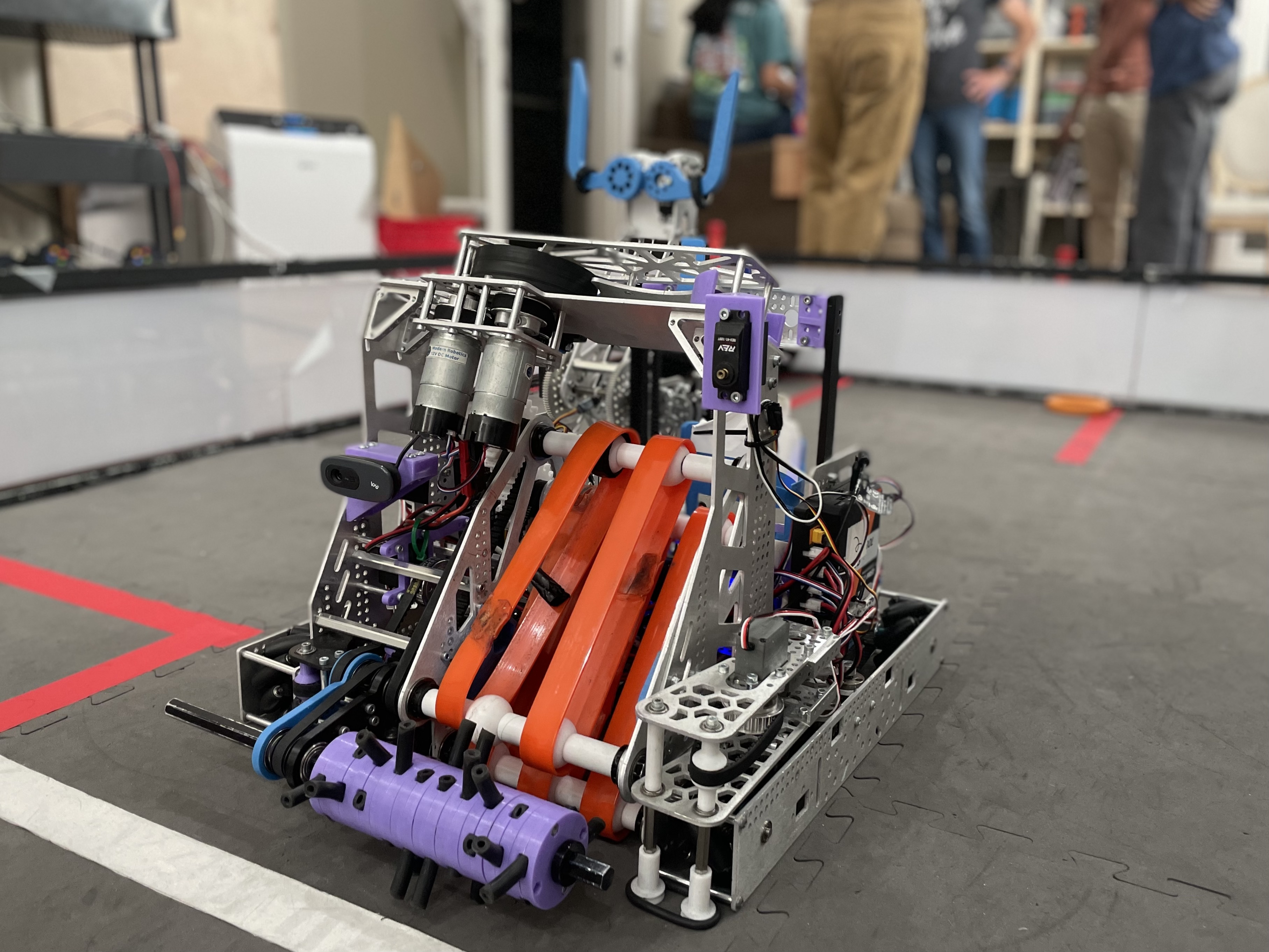
I spent 9 years in FIRST Robotics through Elementary, Middle, and High School. Over these years, I participated in 4 seasons of First Lego League (2013 - 2017) and 6 season of First Tech Challenge (2016 - 2022). The last team I was on was UpLift Robotics which I helped start during COVID in March of 2020. This team was my biggest challenge yet as it was entirely student run leaving us to become financially solvent on our own during a pandemic. With this team, I learned how to manage groups of engineers effectively and how to find new, innovative ways to find funding, brand, and market a team. While this did pull me away from design for my later years of high school, it has given me so much insight into what I want to do in my career and how to work with virtually anyone. Below I'll include pictures of some of the designs I'm most proud of in addition to the website for Uplift Robotics.
Robot Designs



Uplift Robotics: Click here!
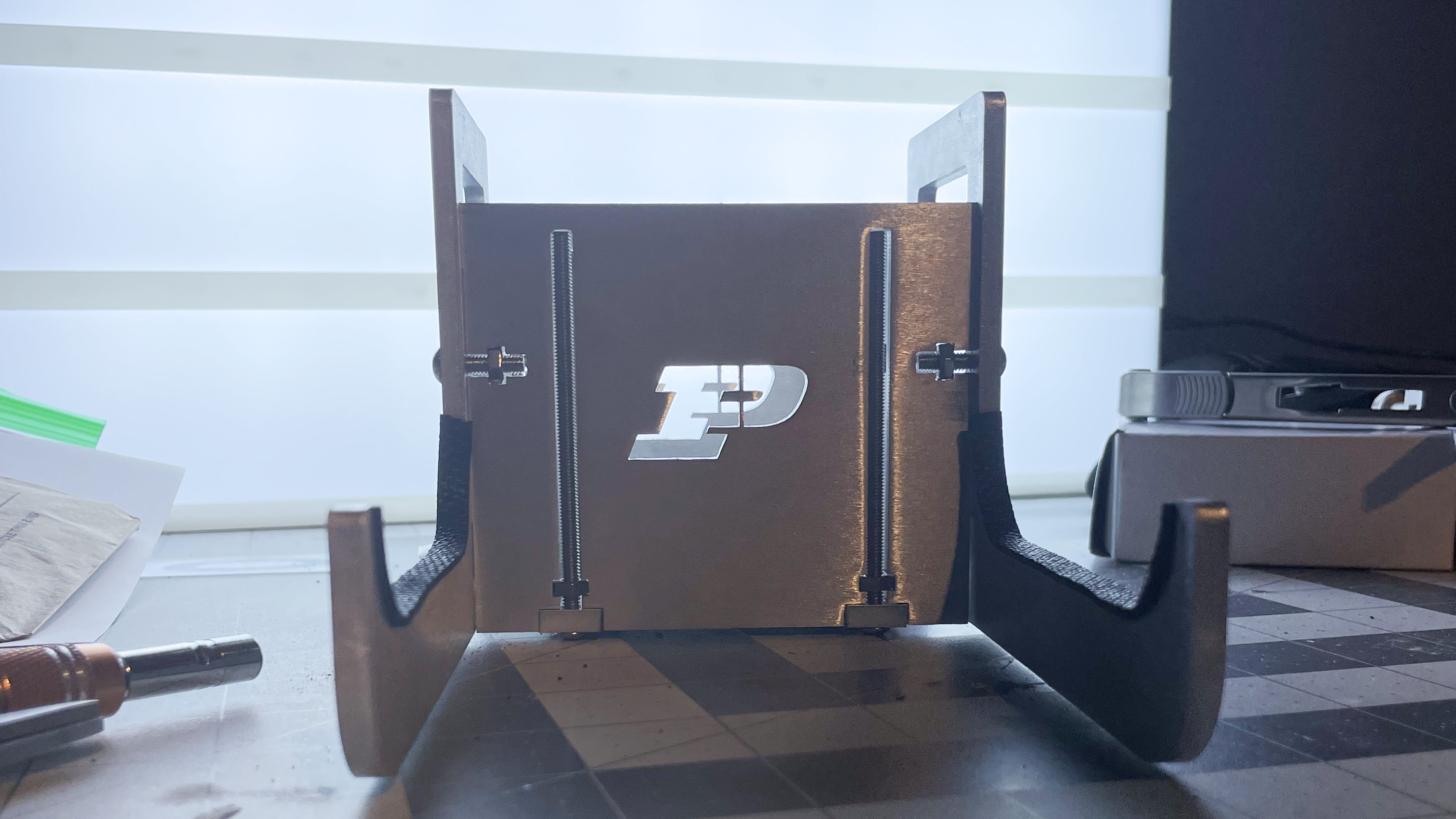
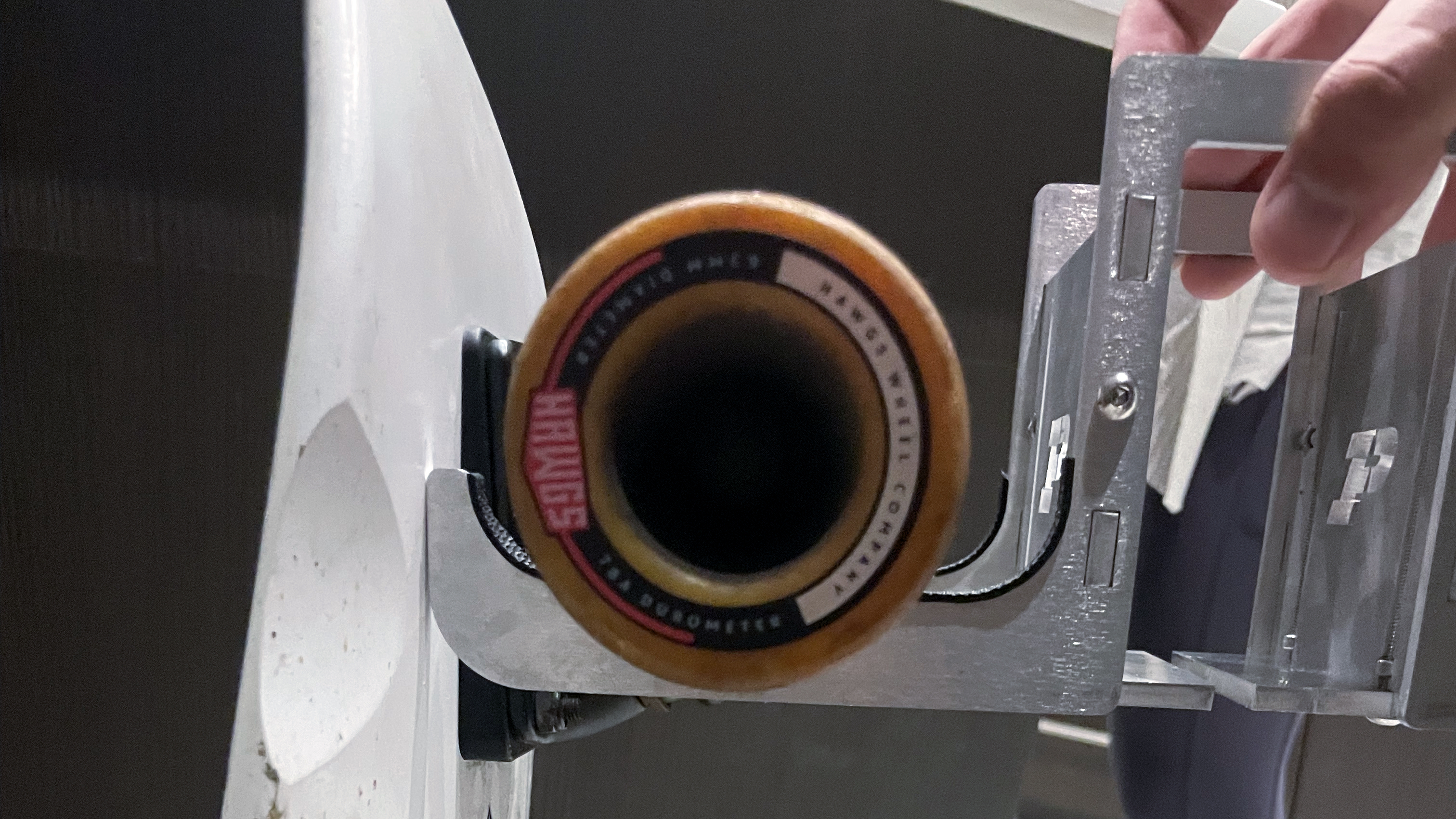
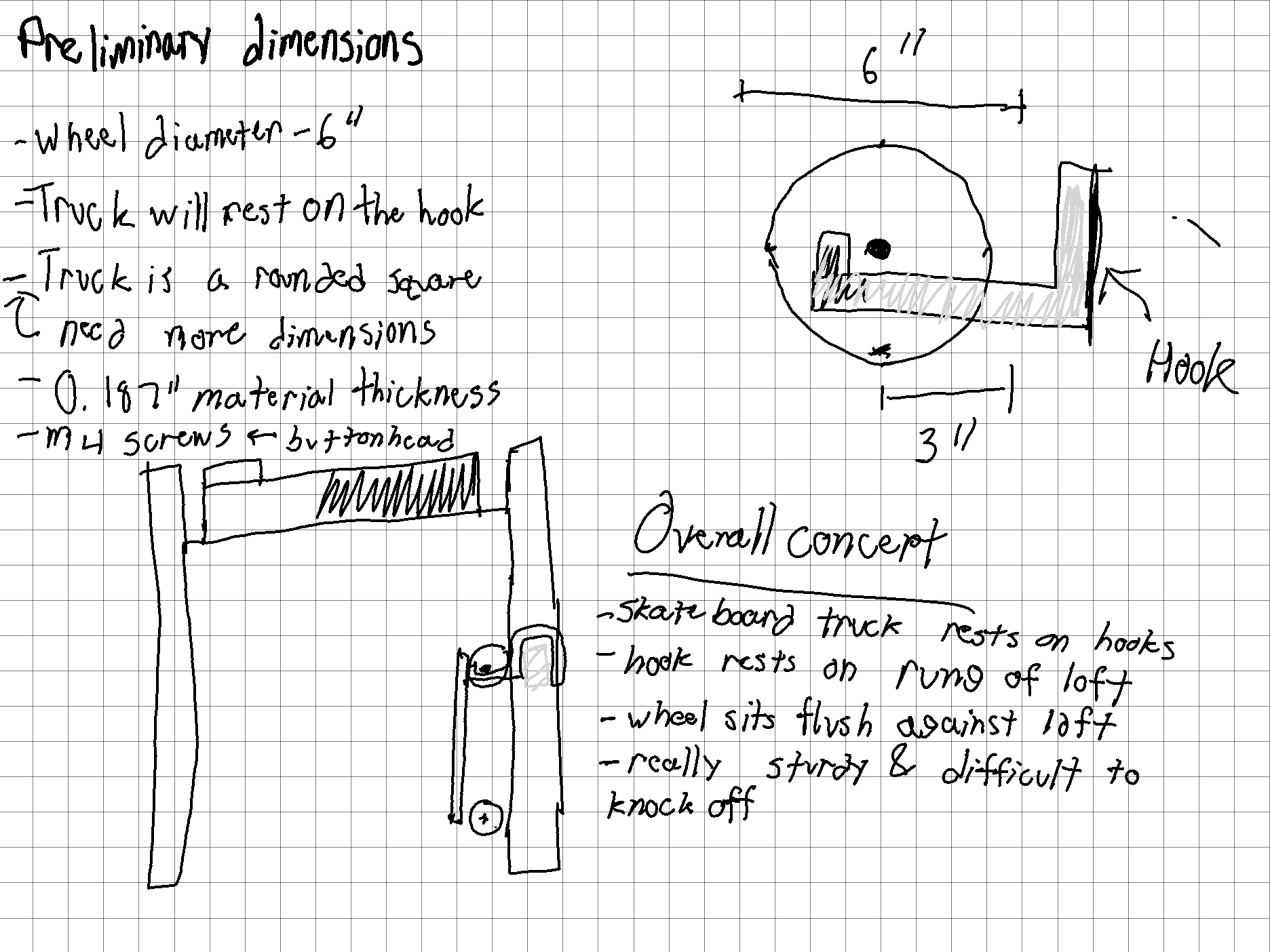
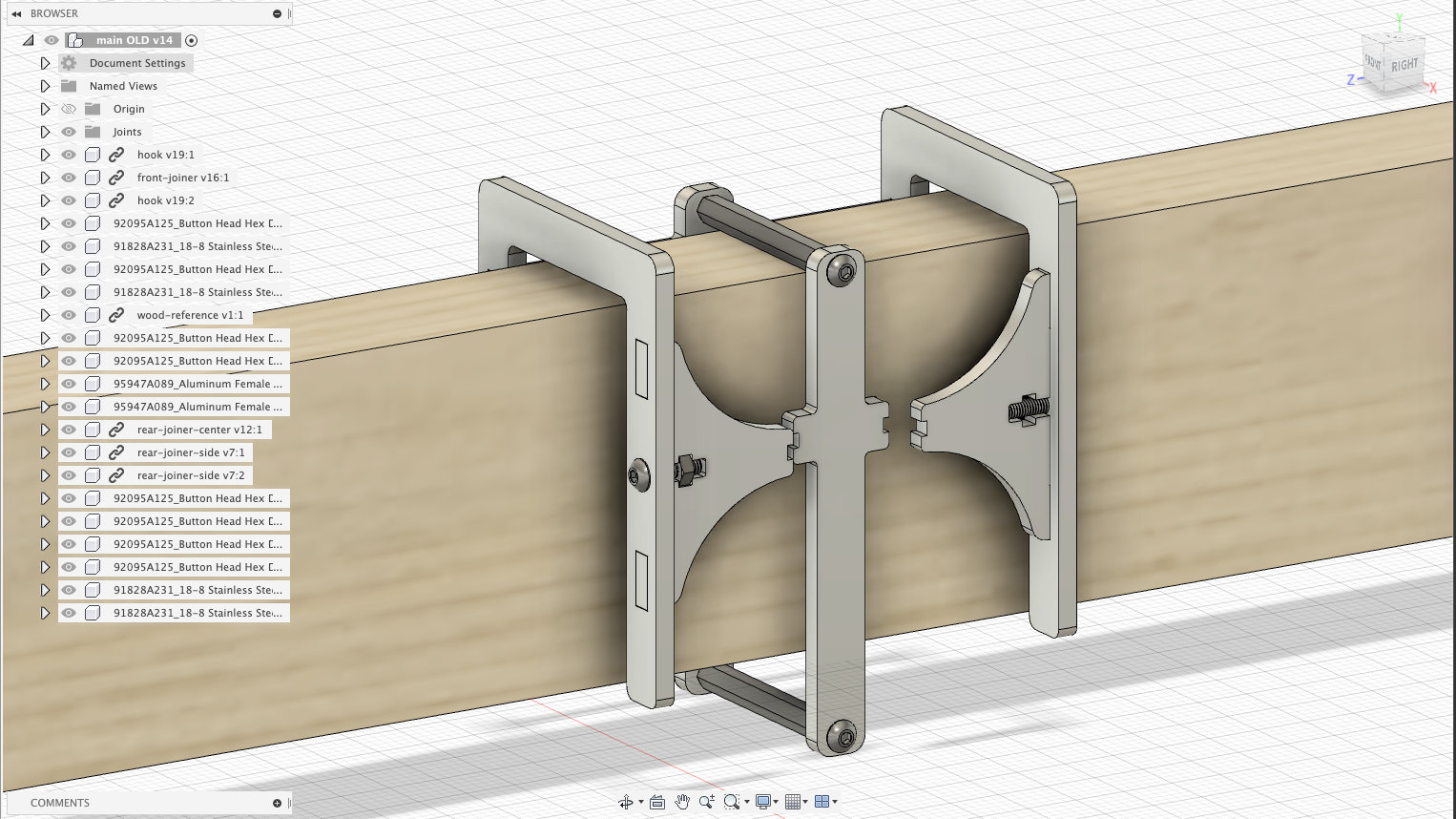
Here's a little 3 day side project I worked on this summer. It's a skateboard rack specifically designed to clamp onto the side of a dorm loft bed. At Purdue, a lot of students have large electric skateboards which take up a lot of space and tend to be quite heavy. With this, we can save a lot of space while ensuring that these expensive, heavy boards are securely hung. If you are interested in one of these mounts, be sure to contact me! I have a few extras from the initial batch and can do another one if I get enough orders.
Initial Design Drawings (final design ended up being revised)
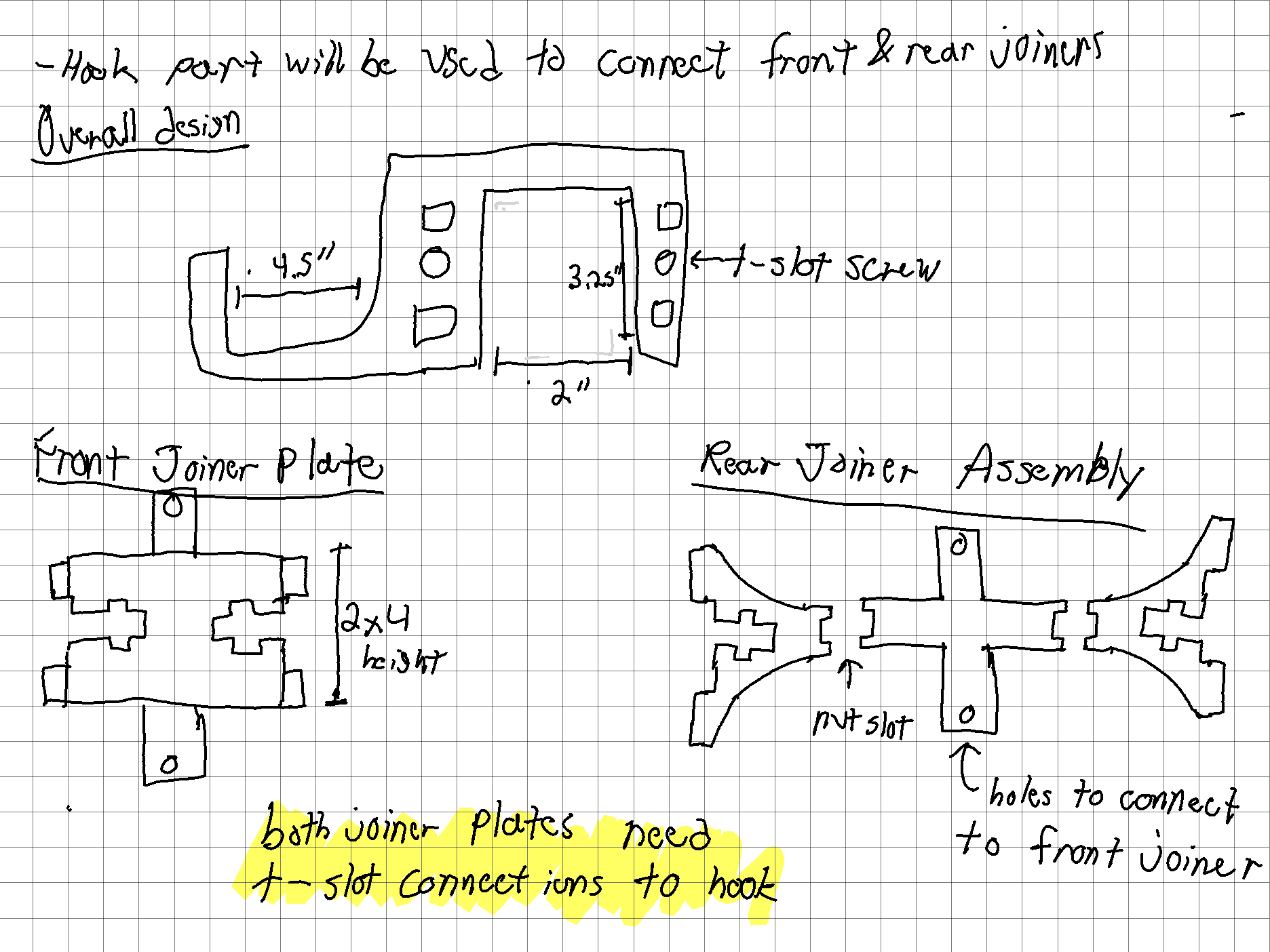
CAD Drawings (Initial on left and Final on right)
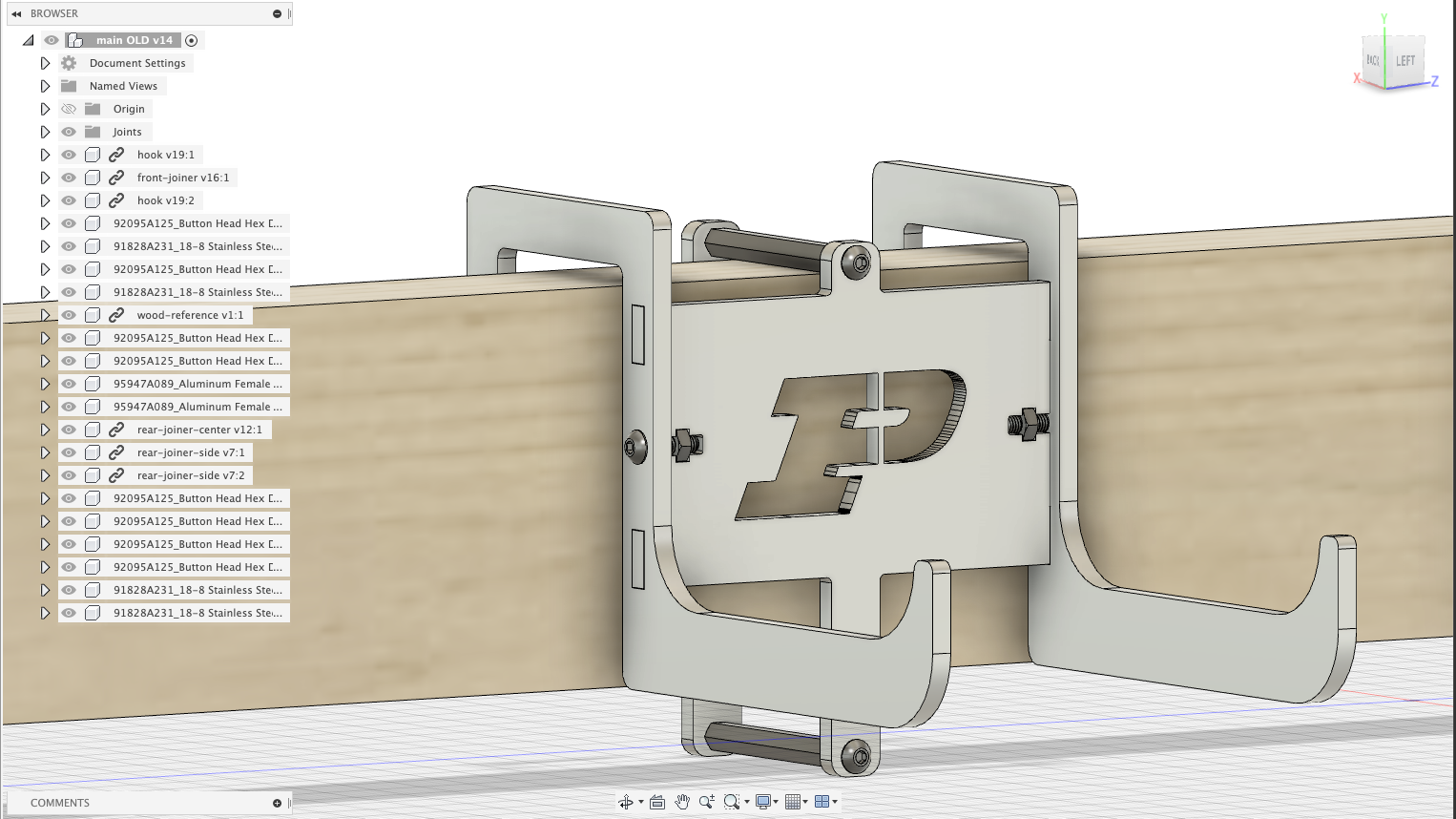


Final Product